주요 연구성과
NEW 기계 연구팀, 초소형 비행체로 활용 가능한 날갯짓 드론 비행제어기술 개발
- 2024-10-08
- 7262
우리 학교 기계공학과 연구팀이 날갯짓 드론에 적용할 수 있는 ‘감각 비행’ 제어기술을 개발하는 데 성공했다. 스스로 바람을 감지하고 목표 위치까지 비행할 수 있는 스파이 로봇, 탐험 및 재난구조 로봇 등에 활용할 수 있을 것으로 기대된다.
아주대 기계공학과 자연모사실험실 강대식·고제성·한승용 교수팀은 날갯짓 드론의 독자적 비행 제어기술을 개발했다고 밝혔다. 해당 내용은 ‘강화 학습을 통한 날갯짓 드론의 스트레인 기반 비행 제어(Wing-strain-based flight control of flapping-wing drones through reinforcement learning)’라는 제목으로 9월20일자 <네이처 머신 인텔리전스(Nature Machine Intelligence)> 표지논문으로 게재됐다. 우리 학교 김태위 박사, 홍인식 박사, 임성훈 학생이 공동 제1저자로 함께 참여했다.
새나 곤충은 비행할 때 감각 비행(fly-by-feel)을 통해 날개와 몸에 느껴지는 바람의 압력과 공기의 흐름을 감지, 방향과 속도를 조절한다. 감각 비행 제어 기술을 활용하면 카메라나 GPS 등의 복잡하고 무거운 센서를 사용하지 않고도 주위 환경 변화를 인지할 수 있어 기동성과 에너지 효율을 높일 수 있다.
날갯짓 드론은 잠자리나 나방과 같은 비행 곤충의 비행 능력을 모방해 만들어져, 프로펠러 방식의 회전익 드론보다 구조체가 유연하고 부드럽다. 이에 충돌에 강하고, 소음저감 효과도 우수해 효율적 초경량 드론 모델로 주목받고 있다.
하지만 날갯짓 드론은 회전익 드론의 제어 방식을 사용하고 있어, 정지 체공은 가능하지만 바람을 타고 비행하는 장거리 비행에는 한계가 있다.
이에 아주대 연구팀은 날갯짓 드론의 독자적 제어 시스템 개발을 위해 비행 곤충의 날개에 위치한 종 모양의 감각 기관(Campaniform Sensilla)에 착안했다. 잠자리나 나방 같은 비행 곤충은 감각 기관인 컴패니폼 센실라를 통해 바람에 의한 날개의 변형 정도를 감지, 신속하게 비행을 제어한다. 잠자리의 날개 하나에만 약 80여 개의 감각기관이 분포하고 있는 것으로 보고되고 있다.
연구팀은 컴패니폼 센실라를 모사한 초경량 고민감도 균열 센서를 개발, 이를 날갯짓 드론에 부착해 날개 변형에 따른 신호 변화를 수집했다. 또 머신 러닝 기술을 활용, 날개 변형 정보 속에 드론 비행 제어에 필요한 바람의 방향과 속도 정보가 포함되어 있음을 확인했다.
연구팀은 새로 개발한 비행 제어 시스템이 날개 변형 정보를 통해 비행 중 바람의 방향과 세기를 80%의 높은 정확도로 분류함을 확인했다. 바람이 부는 환경에서는 드론이 목표 지점으로 날아가 위치를 유지했고, 바람이 불지 않는 환경에서는 스스로 비행 경로를 추적해 사용자가 지정한 6가지 경로로 비행했다.
강대식 교수는 “이번 연구는 기존에 없던 날개변형 정보 기반의 날갯짓 드론 제어 시스템을 개발하고, 실효성을 검증한 데 의의가 있다”라며 “이번 결과가 정지 체공 뿐 아니라 글라이딩이 가능한 날갯짓 드론 개발의 단초가 되길 기대한다”라고 말했다.
이번 연구는 과학기술정보통신부·한국연구재단이 추진하는 중견연구 지원으로 수행됐다.
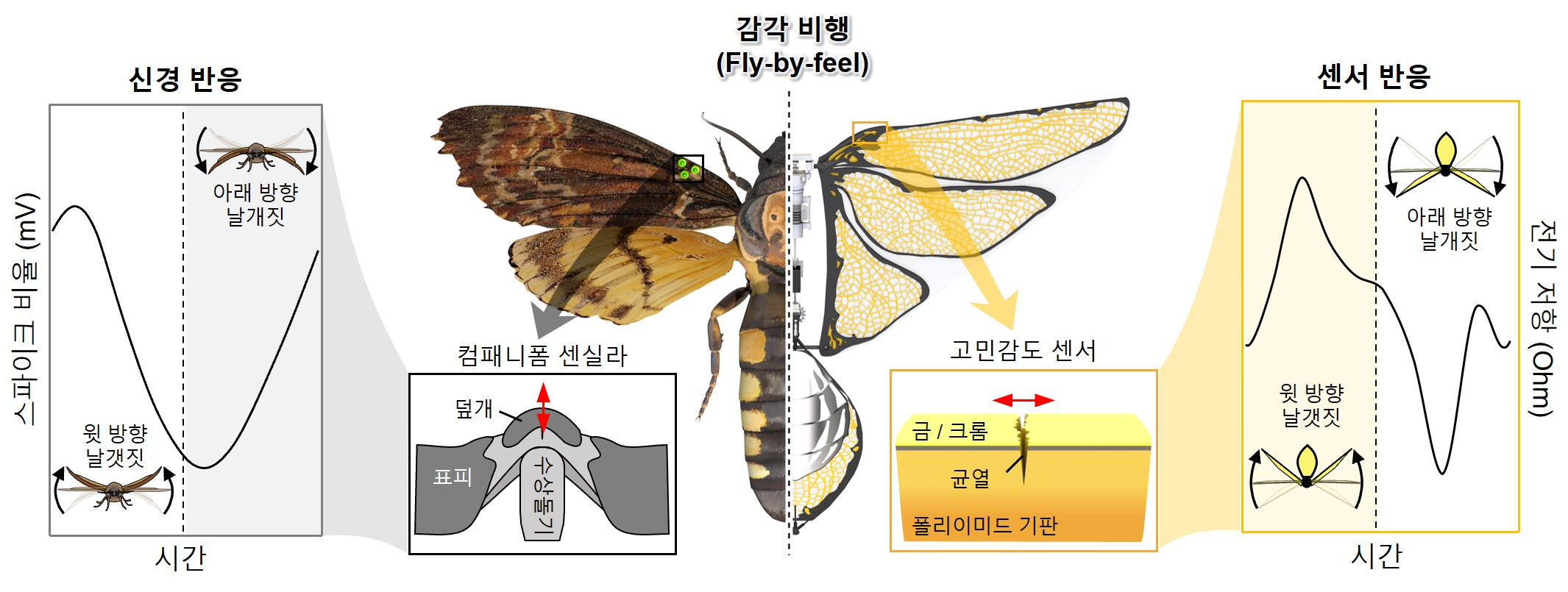
날갯짓 곤충과 날갯짓 드론에서 날개 변형을 감지하는 메커니즘
* 위 사진 : 아주대 기계공학과 자연모사실험실 교수진. 사진 왼쪽부터 강대식·고제성·한승용 교수